
Foto: L. Ingold

Foto: Gramazio & Kohler Research
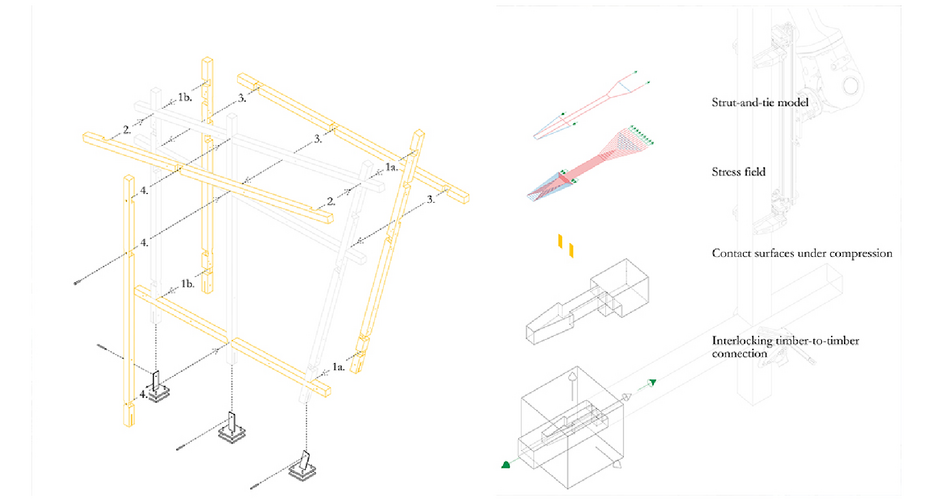
Foto: D. Tanadini
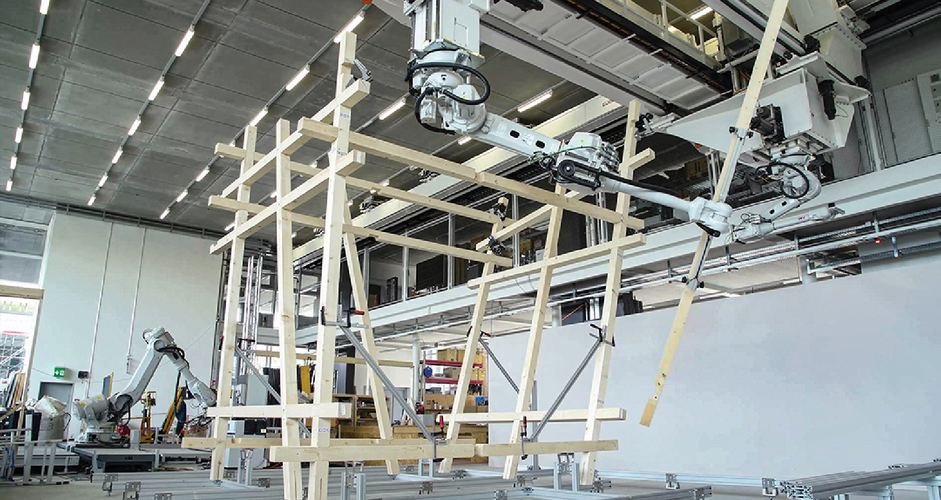
Foto: Gramazio & Kohler Research
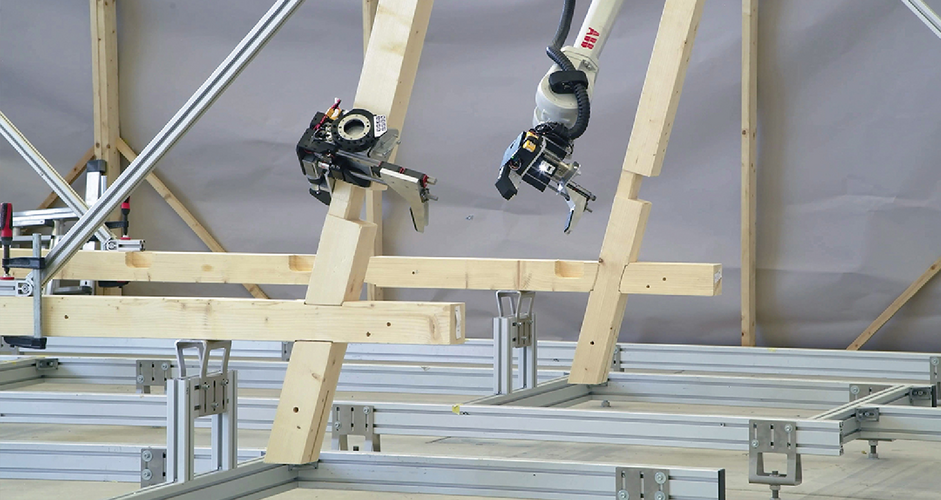
Foto: Gramazio & Kohler Research
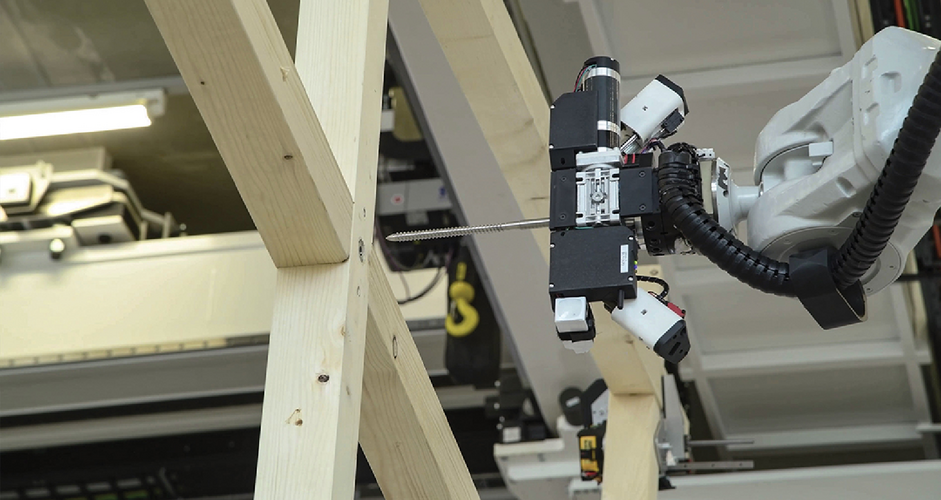
Foto: Gramazio & Kohler Research
CantiBox
CantiBox wurde in Zusammenarbeit zwischen der ETH Zürich (Professur für Structural Design und Gramazio & Kohlrer Research), dem MIT (Digital Structures) und der Technischen Universität München (Professur für Structural Design) entwickelt. CantiBox ist eine robotergefertigte Struktur, die eine neuartige Anwendung des Entwurfs und der automatischen Montage von ineinandergreifenden Holz-zu-Holz-Verbindungen darstellt. Sie besteht aus 60 linearen Elementen aus massivem Fichtenholz mit einem Querschnitt von 10 x 10 cm, die durch maßgeschneiderte Halbschalenverbindungen miteinander verbunden sind. Die Struktur besteht aus drei Einheiten mit jeweils 20 Elementen: zwei seitliche Kästen, die auf dem Boden stehen, und ein auskragender zentraler Kasten. Die Verflechtungslogik der Struktur ermöglicht die Verwendung von ausschließlich ineinander greifenden Holz-zu-Holz-Verbindungen mit nur vier externen Befestigungselementen pro Einheit, um eine Demontage zu verhindern.
Jede Einheit enthält 36 maßgeschneiderte Überlappungsverbindungen, die nach der statischen Methode der Grenzanalyse auf der Grundlage der plastischen Theorie entworfen wurden. Bei einer formschlüssigen Verbindung werden die Kräfte zwischen den Elementen durch komprimierte Kontaktflächen übertragen. Die Kapazität hängt von zwei Parametern ab: der Größe der Kontaktfläche und dem zugehörigen Festigkeitswert. Die Festigkeit der Kontaktfläche gibt die maximale Spannung an, die eine Fläche aushalten kann, während der Festigkeitswert anhand von Spannungsfeldern und Holzfließbedingungen berechnet und anschließend durch mechanische Tests validiert wird. Die Kapazität der Verbindung wird durch die Definition der möglichen Kontaktflächen zwischen den Holzelementen und ihrer Widerstände sowie durch die Übertragung der plastischen Umverteilung der Kraft auf die Kontaktflächen bestimmt. Dieser Ansatz ermöglicht die geometrische Anpassung jeder Verbindung an unterschiedliche Belastungsbedingungen. Die herkömmliche Halbschalenverbindung wird also - wann immer nötig - angepasst, um ihre Kapazität an die inneren Spannungen anzupassen.
Die drei Einheiten werden unabhängig voneinander in einem vollautomatischen Prozess zusammengebaut, bei dem eine Reihe von verteilten Roboterklemmen und Schraubendrehern in Zusammenarbeit mit einem Industrieroboterarm zum Einsatz kommen. Dieser Ansatz ermöglicht die automatisierte Montage von maßgeschneiderten Holzkonstruktionen direkt in 3D im Gegensatz zu flächigen Unterbaugruppen. Gleichzeitig werden die bekannten Herausforderungen bei der robotergestützten Montage von Holzverbindungen überwunden: hohe Montagekraft zur Überwindung der Reibung, gleichzeitige Montage mehrerer Verbindungen sowie Gewährleistung der lokalen und globalen Genauigkeit. Die Aufgaben- und Bewegungsplanung des Roboterprozesses wird automatisch durchgeführt, um dem maßgeschneiderten Design gerecht zu werden.
CantiBox demonstriert zwei hochmoderne Ansätze für gefügte Holzkonstruktionen. Der erste ist die statische Methode der Grenzanalyse für die Bemessung von Holzverbindungen ineinandergreifend. Der zweite ist der Einsatz von verteilten Roboterwerkzeugen, um einen vollautomatischen Montageprozess zu erreichen. Tatsächlich wird jede der drei Einheiten direkt im Raum gebaut. Beide Technologien schließen eine kritische Wissenslücke, die eine maßgeschneiderte Planung und Konstruktion von räumlichen Holzstrukturen ermöglicht. Ihre Flexibilität bei der Anpassung an individuelle Entwürfe zeigt sich in der Verwendung der Verflechtungslogik zur Schaffung eines wechselseitigen Netzwerks.
Projektleitung
Davide Tanadini (Lehrstuhl für Structural Design, ETH Zürich)
Victor Pok Yin Leung (Gramazio & Kohler Forschung, ETH Zürich)
Yijiang Huang (Digital Structures, MIT)
Entwurfsteam
Davide Tanadini (Lehrstuhl für Structural Design, ETH Zürich)
Giulia Boller (Lehrstuhl für Structural Design, ETH Zürich)
Prof. Dr. Pierluigi D'Acunto (Professur für Structural Design, TUM)
Victor Pok Yin Leung (Gramazio & Kohler Forschung, ETH Zürich)
Yijiang Huang (Digital Structures, MIT)
Beteiligte
Dr. Aleksandra Anna Apolinarska, Dr. Lauren Vasey, Gonzalo Casas (Gramazio & Kohler Forschung, ETH Zürich)
Prof. Dr. Agatha Koller, Marco Rossi, Luca Steiner (ILT, OST, Rapperswil)
Caelan Garrett (NVIDIA Seattle Robotics Research Lab, USA)
Philippe Fleischmann und Michael Lyrenmann (NCCR Digital Fabrication, ETH Zürich)
Industriepartner
AUER Holzbau
Studententeam
Rodrigo Mendoza Diaz, Dario Quaglia, Valentin Ribi, Louis Strologo und Leandro Nahuel Barroso (Lehrstuhl für Structural Design, ETH Zürich)